

Desarrollo e Implementación de un Robot Continuo Controlado por Tendones: Proyecto Dr. Otto Octavius



Este proyecto presenta el diseño, implementación y pruebas de un Robot Continuo Controlado por Tendones (TDCR) basado en el personaje ficticio de "Dr. Otto Octavius". El proyecto tiene como objetivo explorar las capacidades y aplicaciones de un sistema robótico semi-flexible, similar a la estructura muscular de un tentáculo de un pulpo. El robot consiste en múltiples segmentos y secciones conectadas por articulaciones universales, actuadas por tendones controlados a través de un sistema electrónico y de comunicación diseñado a medida, controlado remotamente por un sistema de adquisición de datos por medio de sensores tipo IMU.
Contexto
Los avances en robótica han permitido la creación de mecanismos cada vez más complejos y eficientes capaces de replicar movimientos y funciones que anteriormente eran exclusivas de los seres vivos (bioinspiradas). Una de las áreas destacadas de esta evolución es el desarrollo de robots accionados por tendones, una tecnología que ofrece flexibilidad y precisión en la manipulación de objetos o el movimiento de estos a través del espacio, por lo cual se desarrolló un sistema basado en los siguientes referentes similares de investigación:


Para el caso del sistema de columna, se estudió como un sistema semirígido compuesto por uniones de tipo universal que permitieran el movimiento en $q_{1}$ y $q_{2}$ por sección, del siguiente espacio de estados:
$$ \vec{q} = \begin{bmatrix} q_{1} \ q_{2} \ q_{3} \end{bmatrix} $$
Metodología y Materiales
El desarrollo del proyecto involucró varias etapas clave entre las que encontramos:
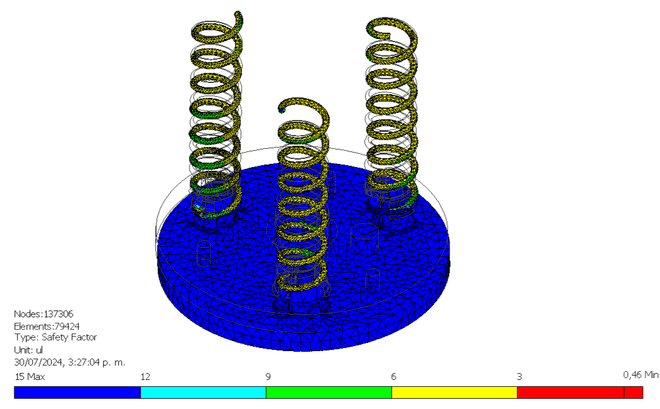
- Simulación y Cálculo de Torque: Se realizó una simulación detallada para calcular el torque necesario para mover el robot, considerando la compresión de los resortes y la resistencia del material en primer lugar aproximando los valores por medio de un espacio de vectores, mostrado a continuación:
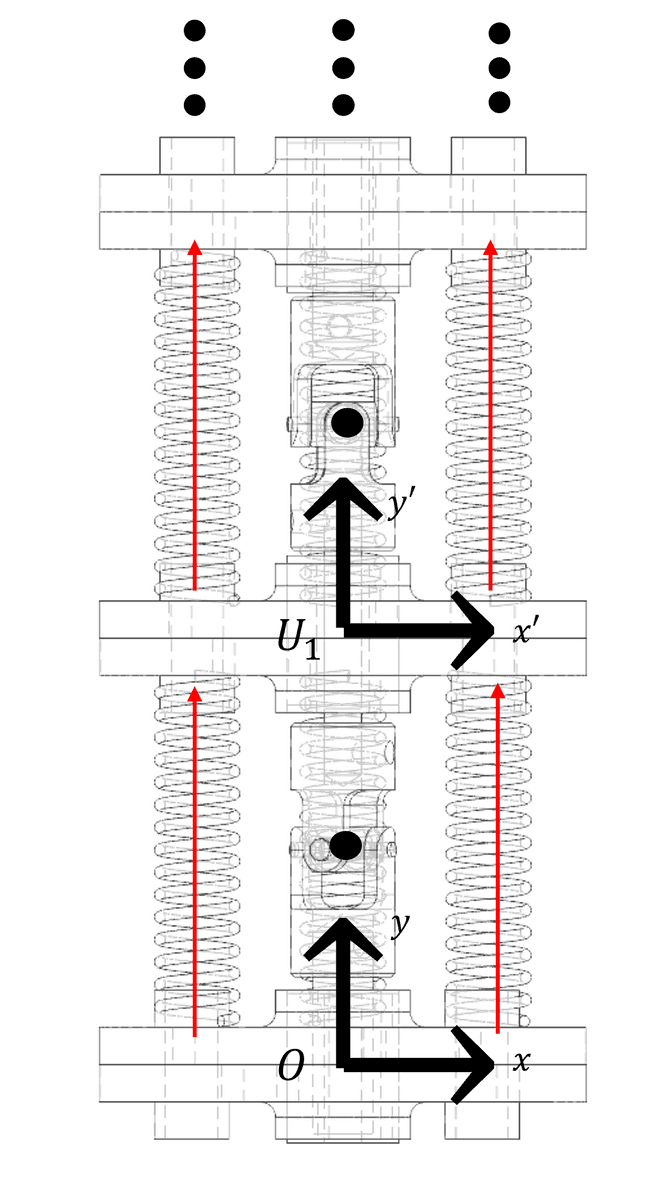
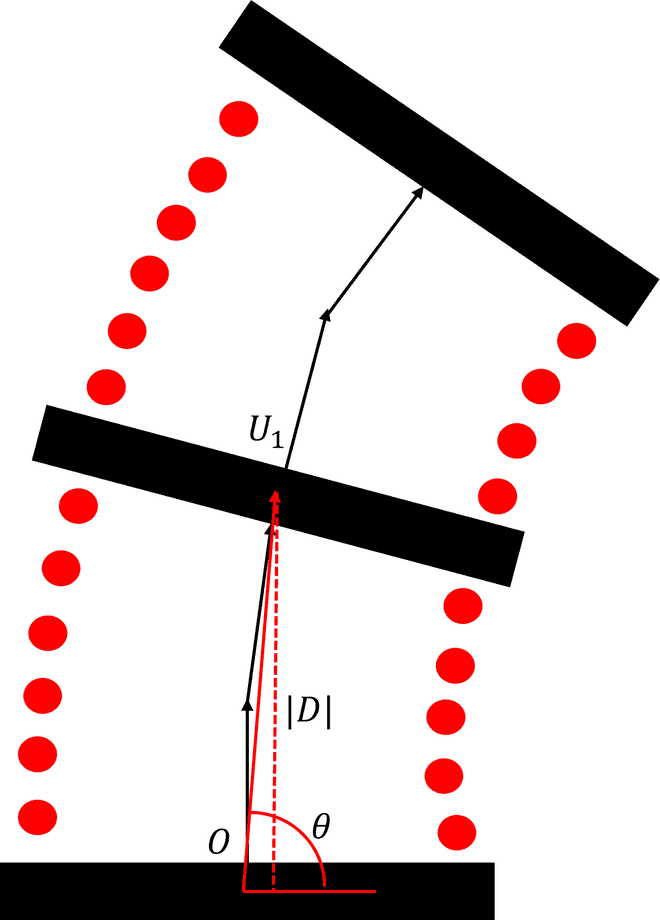
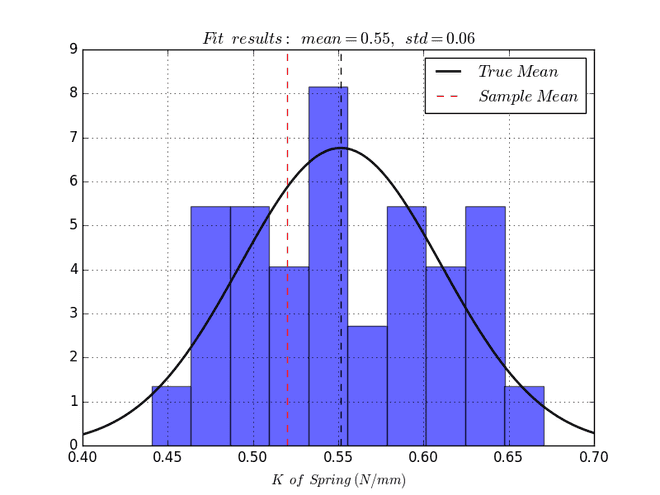
Con esto, se logró obtener la relación movimiento/fuerza de cada tendón, estableciendo un material lo suficientemente elástico como lo son las guayas de acero galvanizado ($M_y= 207;GPa$). Se logró obtener un modelo ajustable por secciones, en el cual se puede determinar la posición final del TDCR en función de los ángulos de movimiento y la compresión de cada módulo. Esta compresión fue aproximada mediante instrumentación y simulación del sistema delta de resortes con aproximación de estos a un caso real:
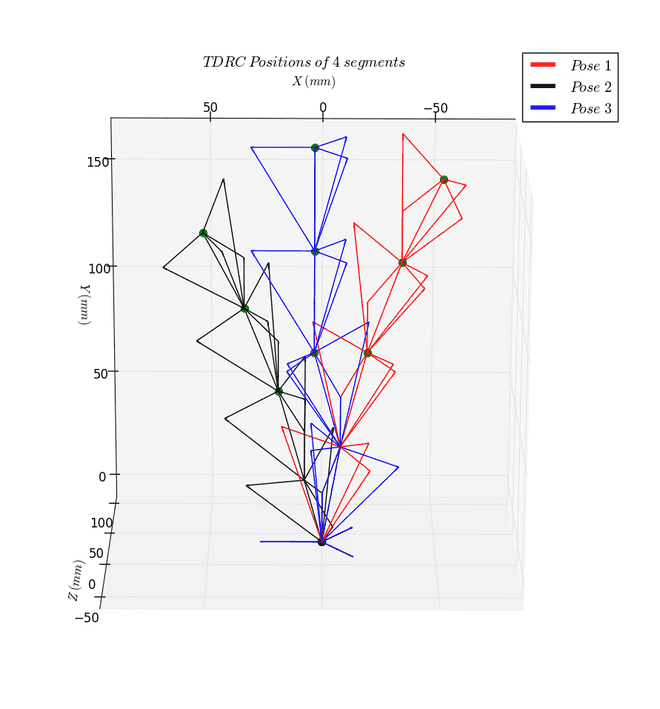
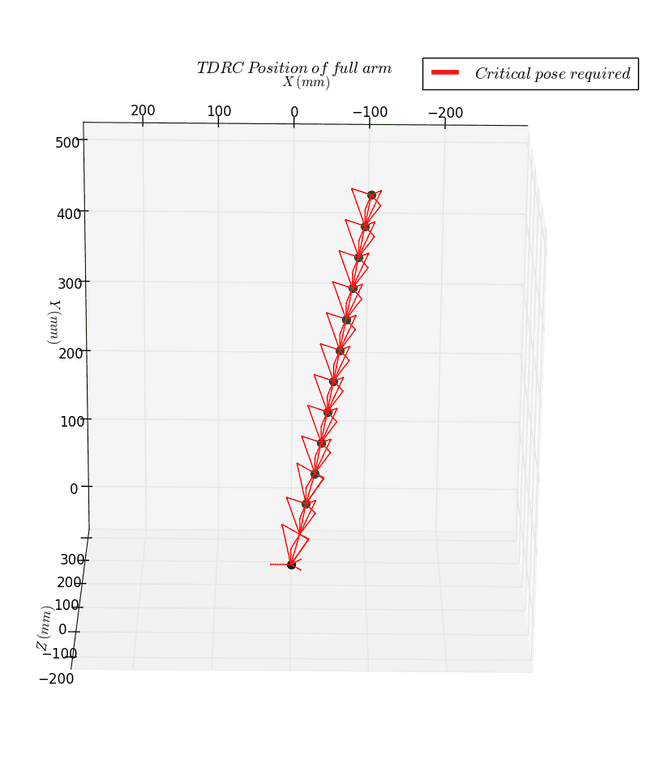
Una vez delimitado el movimiento de compresión y elongación, se desarrolló el software de simulación cinemática. A continuación, se presentan los posibles estados obtenidos para diferentes configuraciones de ángulos, considerando el caso de 4 y 12 secciones.
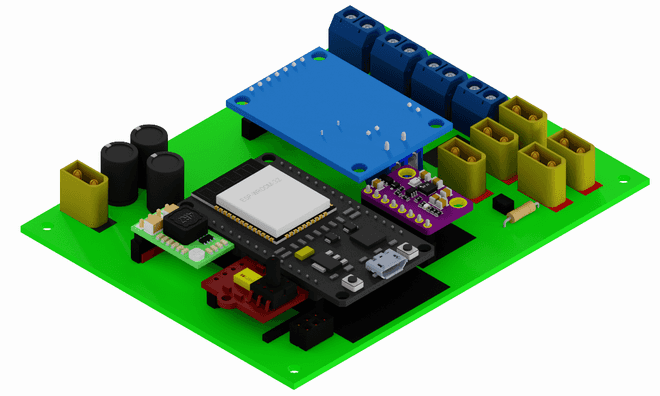
- Diseño y Fabricación de la Parte Electrónica: Incluye la selección y configuración de motores tipo "brushless" con drive marca MyActuator, controlados por protocolo CAN, así como la integración de sensores tipo IMU y de carga en el caso del sistema remoto de comunicación, junto con los sistemas de administración de potencia y lectura/escritura en estos motores. A continuación se presentan las PCB's de los sistemas mencionados:

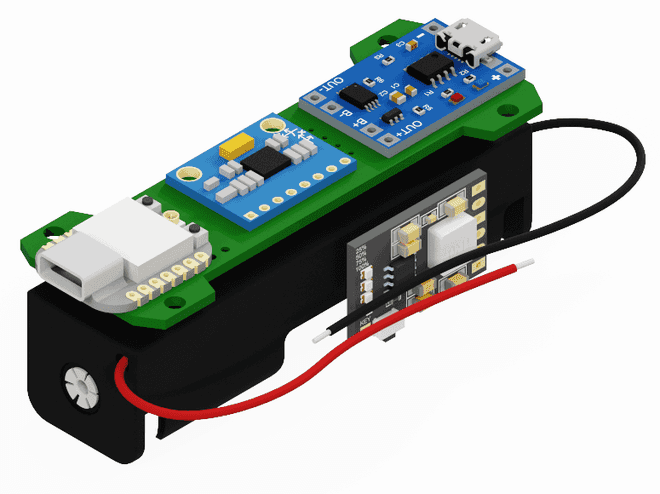
Se incluye el diseño interno llamado core para el control de los sistemas:

- Ensamblaje del Sistema: Las pruebas validarón desarollando el ensable del sistema según el diseño inicial planteado, iterando desde la manufactura de este, mejorando su disposición para el control y manejo de es, se presentan los siguientes resultados obtenidos durante el emsanble:



- Evaluación: Finalmente, se comprobo el movimiento y efectividad del modelo con la aplicación del torque necesario en cada uno de los tendones, junto con la comprobación de ubicación por medio de ArucoCodes y junto con la latencia mínima de comunicación.


Resultados y Conclusiones
El proyecto demostró el potencial de los TDCR en el acceso a áreas dificiles para los brazos convencionales, esto basado en el hecho de poder estar en situaciónes de mayor restricción geométrica conservando parte de su movimiento. Así pues tambien se estableció una mejora considerable en el movimiento ofrecido por un sistema conjunto en contraposición de los sistemas controlados por controles o directamente por consola.
-
Optimización del Diseño Mecánico: La incorporación de módulos equidistantes y un sistema de transmisión de potencia eficiente mejoraron la maniobrabilidad y estabilidad del robot en situaciónes de no sobre tensión.
-
Desarrollo de un Sistema de Control Portátil: Se implementó un sistema de control portátil basado en movimientos de cabeza, lo que permitió un control preciso y responsivo del robot. Mejorando la interacción de personas con dificultades en extremidades superiores, mejorando su integración con un tiempo responsivo.
-
Pruebas y Validación: El robot fue evaluado en diversos escenarios, confirmando su capacidad para realizar movimientos complejos.
Este proyecto establece una plataforma versátil para la investigación en robótica y tecnologías emergentes, fomentando avances en mecanismos análogos a los tradicionales.